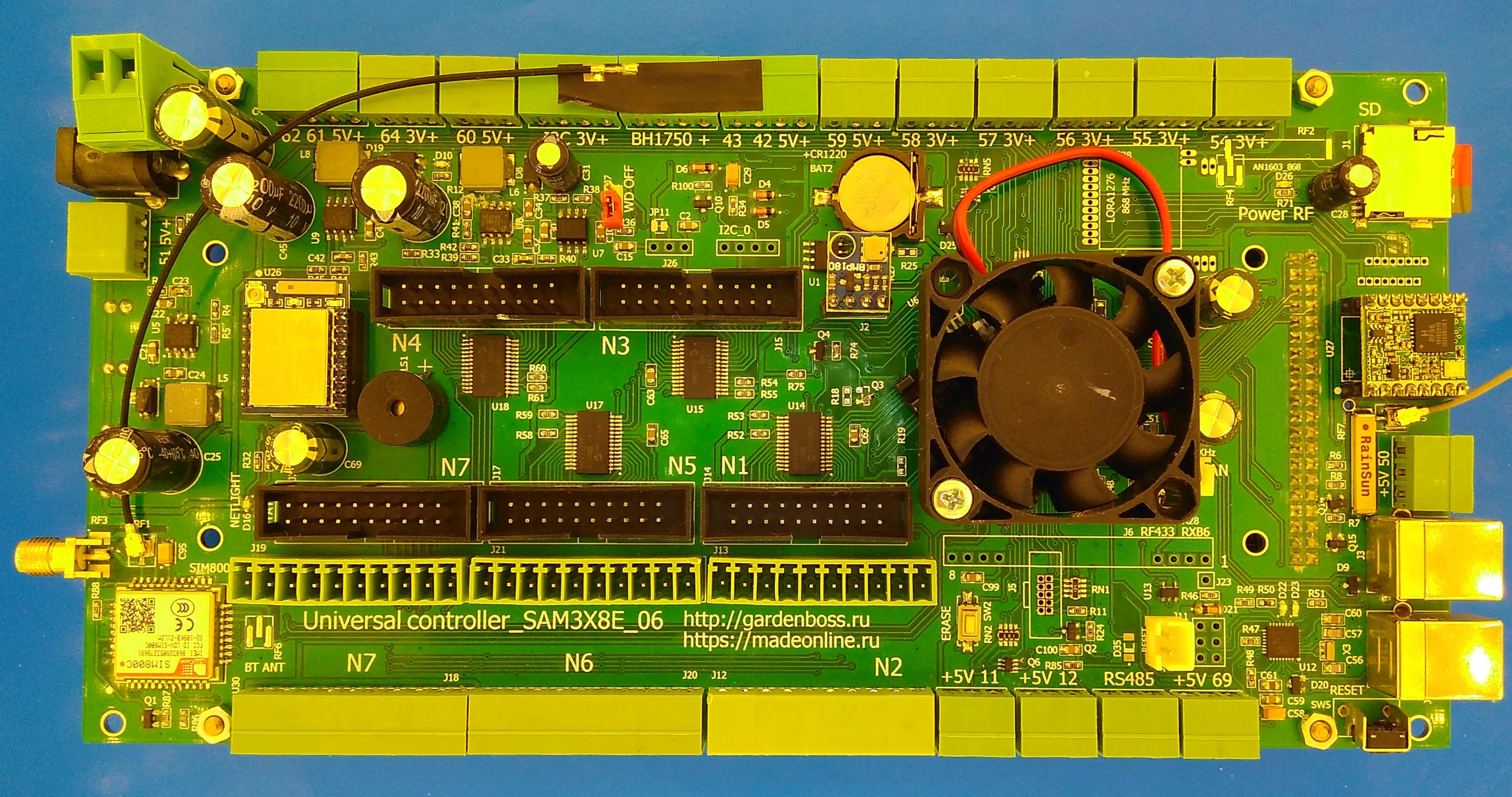
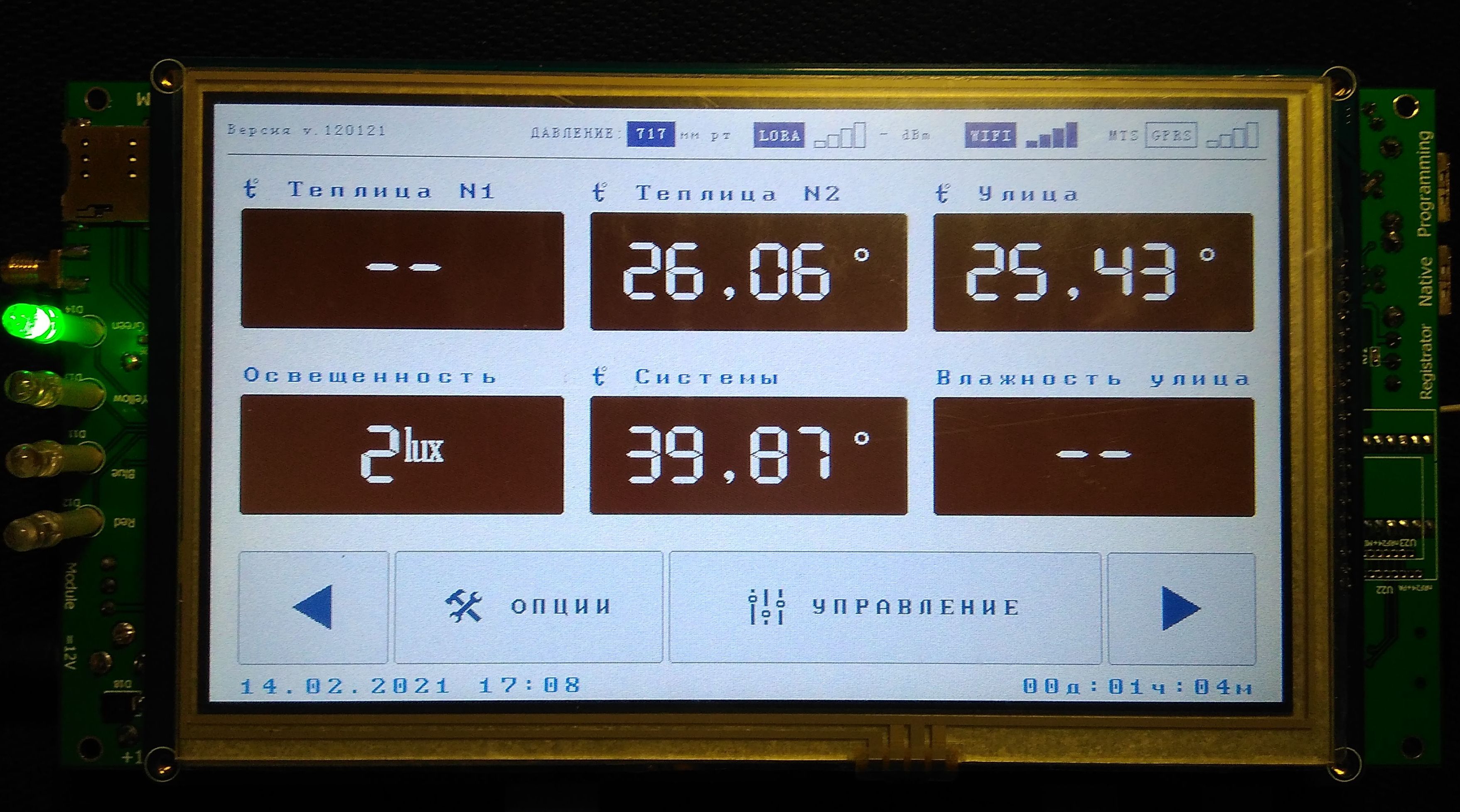
Главная Контент Автоматика для теплицы Как автоматизировать теплицу и что для этого нужно. Александр, 07.05.2021 | Автоматика для теплиц Автоматика для теплицы. Устройство полива В данной статье описывается устройство системы полива Александр, 09.06.2021 | Автоматика для теплиц Автоматика для теплицы. Метеостанция Подключение метеостанции к контроллеру теплицы. Александр, 14.06.2021 | Автоматика для теплиц Контроллер теплицы. Подробно об устройстве контроллера Подробно описывается устройство контроллера для теплицы серии «Universal controller_SAM3X8E_ХХ» Александр, 15.06.2021 | Автоматика для теплиц Автоматика для теплиц на STM32 В данной статье рассказывается об устройстве контроллеров теплицы. , 07.01.2021 | Автоматика для теплиц